![]()
![]()
![]()
 Манипуляторы электронных ключей.
Манипуляторы электронных ключей.
Манипулятор является важной составной частью любого электронного ключа. От его конструкции будут зависеть качество работы телеграфом, степень утомляемости оператора, возможность работы в широком диапазоне скоростей. Кроме того, манипулятор, при изготовлении которого уделено соответствующее внимание его дизайну, несомненно украсит рабочее место радиолюбителя. Существует немало конструкций манипуляторов выполненных как по классической схеме в виде пилы, так и по нетрадиционной, например, с сенсорами.
Простые манипуляторы легче в изготовлении, но обеспечивают меньший сервис, более сложные манипуляторы обладают и большими возможностями.
Вниманию читателей предлагается несколько манипуляторов электронных ключей разной степени сложности.
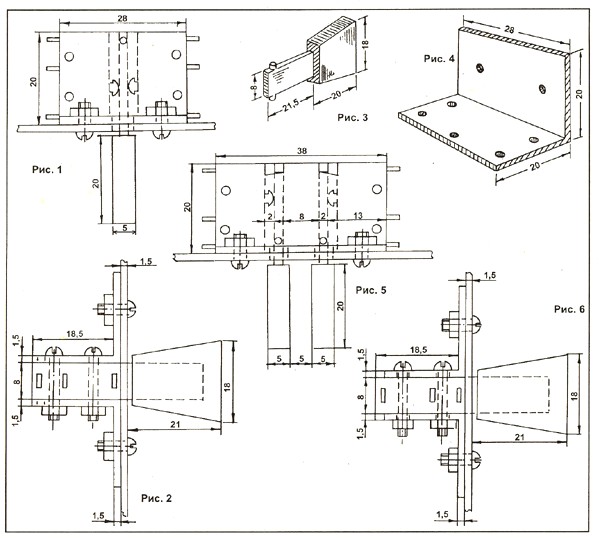
 Манипулятор "Микро-1" показан на
рисунках 1 (вид сверху) и 2 (вид сбоку). Он состоит из двух уголков (рис.3),
управляющей пластины с пластмассовым наконечником (рис.4) и двух
микропереключателей типа МП1-1, МП3-1, МП-5, МП-9, МП-10, МП-11. Манипулятор
крепится к передней панели трансивера четырьмя болтами М3. Цилиндрические
наплывы управляющей пластины входят в отверстия уголков. Через эти наплывы
проходит ось качания управляющей пластины. При её качании срабатывают концевики,
замыкающие, в свою очередь, своими контактами управляющие цепи электронного
ключа. Этот манипулятор имеет малые габариты, прост в изготовлении, не портит
дизайн передней панели при установке его в трансивер, хотя и обладает
минимальными сервисными возможностями.
Манипулятор "Микро-1" показан на
рисунках 1 (вид сверху) и 2 (вид сбоку). Он состоит из двух уголков (рис.3),
управляющей пластины с пластмассовым наконечником (рис.4) и двух
микропереключателей типа МП1-1, МП3-1, МП-5, МП-9, МП-10, МП-11. Манипулятор
крепится к передней панели трансивера четырьмя болтами М3. Цилиндрические
наплывы управляющей пластины входят в отверстия уголков. Через эти наплывы
проходит ось качания управляющей пластины. При её качании срабатывают концевики,
замыкающие, в свою очередь, своими контактами управляющие цепи электронного
ключа. Этот манипулятор имеет малые габариты, прост в изготовлении, не портит
дизайн передней панели при установке его в трансивер, хотя и обладает
минимальными сервисными возможностями.
Данный манипулятор можно рекомендовать для установки в малогабаритный трансивер, используемый в полевом (экспедиционном) варианте.
На рисунке 5 показан вид сверху на манипулятор "Микро-2", а на рисунке 6 его вид сбоку. Этот манипулятор выполнен аналогично предыдущему, но в отличии от него имеет две управляющие пластины. Хотя этот манипулятор несколько сложнее предыдущего в изготовлении, однако обладает всеми преимуществами двойного манипулятора. У него менее заметен эффект дребезга контактов, кроме того его можно использовать в электронном ключе, имеющем ямбический режим, заключающийся в возможности работы ключа при одновременном нажатии обоих управляющих пластин (рычагов). На рисунке 7 показан уголок, а на рисунке 8 управляющая пластина (рычаг) манипулятора "Микро-2".
Рассмотренные выше манипуляторы наряду с достоинствами имеют и один существенный недостаток, заключающийся в невозможности регулирования жесткости управляющих пластин.
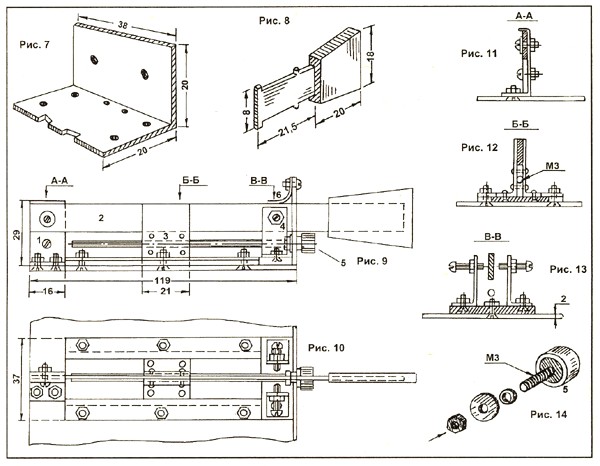
Манипулятор"пила показанный на рисунке 9 (вид сбоку) свободен от этого недостатка. Он выполнен по классической схеме. Его управляющая пластина 2 изготовлена из обломка ножовочного полотна. К основанию ключа она крепится с помощью уголка 1. Регулировка жёсткости осуществляется путём перемещения узла 3 в пазах основания манипулятора при вращении стержня 5 имеющего резьбу М3. В узле 3 имеется резьбовое отверстие М3, в которое и вкручивается стержень 5 при его вращении. Контактные узлы 4 установлены на стеклотекстолитовой пластине толщиной 4 мм. Выше контактных узлов установлена латунная, пружинящая пластина 6 свободным концом касающаяся "пилы" и служащая для гашения (демпфирования) нежелательных вибраций. На рисунке 10 показан вид манипулятора сверху. На рисунках 11, 12, 13 показаны разрезы А-А, Б-Б, В-В, а на рисунке 14 порядок сборки узла 5.
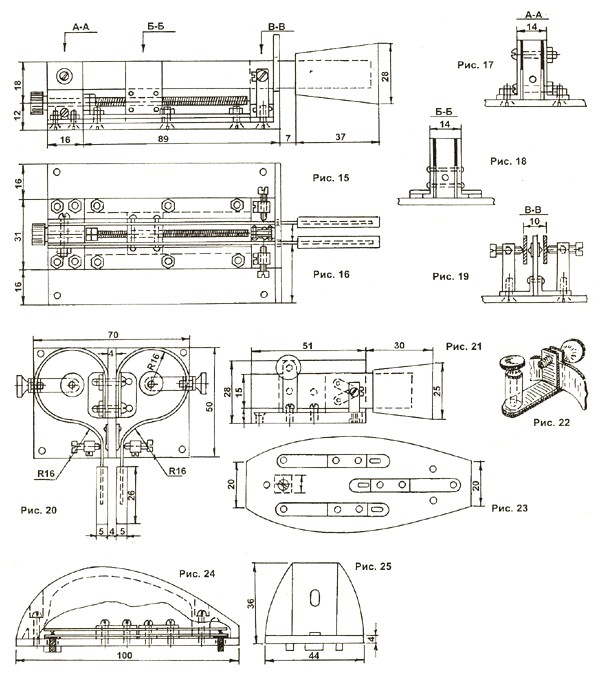
На рисунке 15 показан двойной манипулятор "Пила-2" (вид сбоку). Он выполнен аналогично предыдущему. Отличие состоит в наличии двух "пил" и установки ручки регулирования жёсткости сзади манипулятора. Вид этого манипулятора сверху показан на рисунке 16. На рисунках 17, 18, 19 показаны разрезы манипулятора по плоскостям А-А, Б-Б, В-В. Контакты манипулятора (смотри разрез В-В) выполнены из контактов реле (пружинящие пластины обрезаны до необходимых размеров) напаянные на неудалённые фольгированные участки стеклотекстолитовой пластины прикрепленной, в свою очередь, к уголкам медными заклёпками.
На рисунке 20 (вид сверху) показан манипулятор "Любовь морзянки". К его достоинствам следует отнести малые размеры и возможность раздельной регулировки жёсткости пластин. Вид этого манипулятора сбоку показан на рисунке 21. Узел регулировки жёсткости показан на рисунке 22. Его работа понятна из рисунка. Жёсткость управляющих пластин регулируется путём поворота вокруг своих осей радиальных зажимных пластин. После регулировки жёсткости, пластины фиксируются контровыми винтами. Управляющие пластины, имеющие в плане вид сердечка, крепятся к основанию манипулятора с помощью стеклотекстолитовой пластины толщиной 4 мм и двух уголков. На этой пластине так же установлены и контакты. Узлы регулировки зазоров, в качестве которых использованы контакты от поляризованного реле типа РП4, РП5, РП7, установлены непосредственно на основании манипулятора. В качестве контактов используются отрезки контактных пластин подходящих по размеру реле. Сердечкообразно изогнутые рычаги манипулятора могут быть изготовлены из упругого металла (латунь, нержавеющая сталь, упругие сорта дюралюминия).
На рисунке 23 показан манипулятор электронного ключа "Телеграфная мышь" (вид сверху). Основу этого манипулятора составляет дюралюминиевая пластина толщиной 4 мм, на которой укреплены три контактные группы реле. Средняя группа контактов используется в качестве тангенты (педали) трансивера, а две крайние в качестве контактов формирования точки и тире. Сверху этот манипулятор прикрыт фигурной (в виде полугруши), пластмассовой крышкой, в качестве которой используется верхняя крышка от электробритвы "Харьков-6". Работает манипулятор "Телеграфная мышь" следующим образом. При наложении ладони на манипулятор замыкается средний контакт (под тяжестью кисти), трансивер переводится в режим передачи. Затем покачивая кисть слева направо замыкаются крайние контакты формируя посылки точек и тире. Качание "мыши" осуществляется благодаря квадратному уступу с округленными концами, расположенному между крайними контактами. В качестве элементов передачи нажимного усилия от поверхности стола к контактам используются фторопластовые втулки от высокочастотного разъёма СР-50. На рисунке 26 показан вид манипулятора сбоку (пластмассовая крышка дана с разрезом для обеспечения возможности обзора контактов сбоку), а на рисунке 25 - спереди.
На рисунке 26 показан манипулятор, имеющий название "Двойной дуговой" (вид сверху). Рычаги управления этого манипулятора изогнуты в виде дуг, что сделало его компактным, позволило удобно разместить контакты, одновременно использовав их в качестве регуляторов зазора, а так же позволило применить простое схемное решение раздельной регулировки жёсткости управляющих рычагов. Регулировка жёсткости осуществляется вращением круглых гаек, перемещающихся в осевом направлении по резьбовой шпильке, сжимающих при этом пружины и увеличивая, тем самым, жёсткость рычагов манипулятора. Контакты использованы от поляризованного реле типа РП4, РП5, РП7 и установлены на стеклотекстолитовой пластине. На рисунке 27 показан вид этого манипулятора сбоку, на рисунке 28 общий вид с крышкой. Сверху в крышке манипулятора проделано два квадратных отверстия для выхода гаек регулировки жёсткости рычагов.
И, наконец, на рисунке 29 показан манипулятор "Полюс" (вид сверху), в котором в качестве элементов регулировки жёсткости рычагов используются постоянные магниты. Этот манипулятор, так же как и предыдущий, позволяет раздельно регулировать жёсткость каждого рычага, что представляет несомненное удобство в работе, ибо сила разных пальцев, как известно неодинакова. Рычаги манипулятора изготовлены из магнитного материала (железо), основание и пластина осей рычагов из дюралюминия, резьбовая втулка ограничения движения рычагов навстречу друг другу из латуни, контакты рычагов (в виде заклёпок) так же должны быть изготовлены из немагнитного металла. Контакты с болтами регулировки зазора установлены на стеклотекстолитовой планке. Уголки крепления магнитов изготовлены из железа. Магниты могут иметь произвольную форму в сечении (круг, квадрат и др.), к уголкам они крепятся клеем суперцемент. Регулировка жёсткости рычагов осуществляется передвижением уголков с магнитами относительно самих рычагов. После регулировки уголки фиксируются винтами М3. Вид манипулятора сбоку показан на рисунке 30. На рисунках 31, 32 и 33 показаны разрезы манипулятора по плоскостям сечения А-А, Б-Б, В-В.
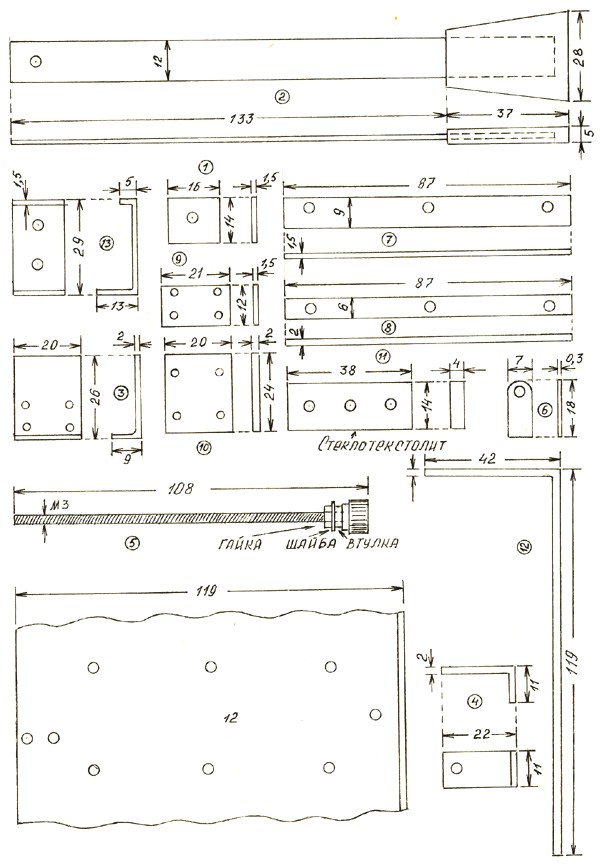
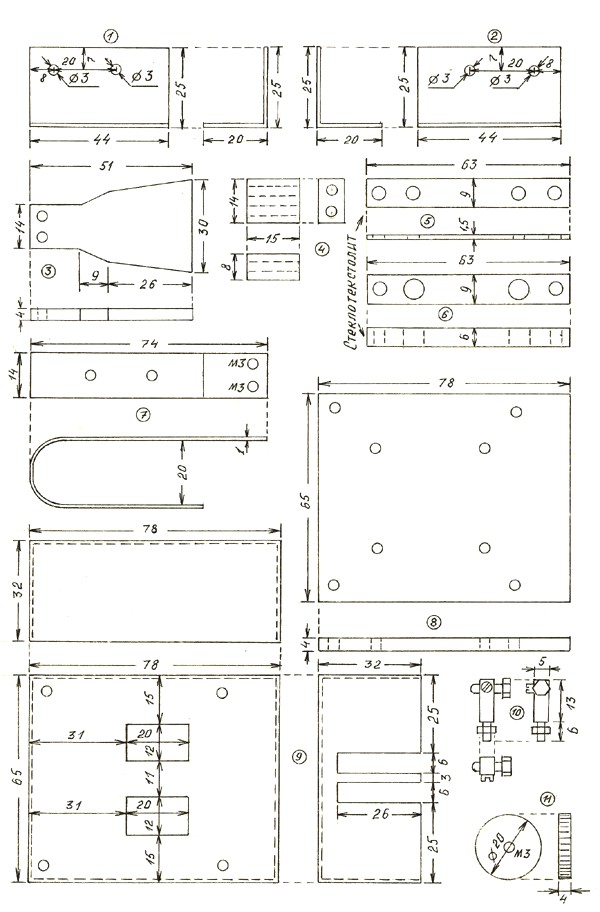
Кликнув мышкой по нижепредложенным ссылкам вы можете ознакомиться с рисунками, указанными в тексте, а также с дополнительным графическим материалом, наиболее часто запрашиваемым читателями, в котором более детально раскрыты составные элементы манипуляторов "Пила-1", "Пила-2", "Двойной дуговой".
5. Чертежи деталей манипулятора "Пила-1".
6. Чертежи деталей манипулятора "Пила-2".
7. Чертежи деталей манипулятора "Двойной дуговой".
Внимание! Так как чертежи представляют из себя довольно объемную информацию, то при их загрузке, пожалуйста, подождите несколько минут!
Казахстан, Астана, Рубцов В.П. UN7BV.
73!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}